こんにちは! けい(Twitter)です。
今回は、3Dプリンターでロボットアームを作る計画をまとめていきます。
目次
記事投稿予定リスト
今後何回かに分けて、ロボットアームを作成していく過程の記事を書いていく予定です。
私自身、3DCADやプリンター、機構の知識がほとんどありません。勉強していく過程でアウトプットしています。なので、私と同じような全然知識が無い方でもゼロからロボットアームを作れるような記事を書いていきたいと思います。
- ロボットハンドの設計編
- ロボットハンドの電動化(Arduinoで動かす)
- サーボモータの実験編
- ロボットアームの全体の設計編
- ロボットアームを動かしてみる
- 順運動学と逆運動学についてまとめる
- 逆運動学に基づいたロボットアームの制御
とりあえず、7個のパートに分けてみました。
計画通りに進められるかは分かりません。途中で躓くこともあるかもしれませんが、出来るだけ多くの情報をブログを通じて伝えられればと思います。
ロボットアームを作ろうと思った理由・目的
私がなぜロボットアームを作ろうと思ったかをまとめました。
順に詳しく見ていきます。
ロボットアームを3DCADで設計 & 3Dプリンタで作りたい
このブログでは今までいくつかのロボットを作ってきました。
これら全て、ロボットのボディは既製品を使ってきました。
つまり、自分で設計したロボットは作ったことがなく、既製品をただ組み合わせてきただけでした。
何となく、自分で一から設計したロボットを作ってみたいと思っていましたが、中々手が出ませんでした。(自分で設計したロボットをブログに投稿しても伸びないのは分かってるし)
ですが、学生もあと一年しかないし、時間を使って何か挑戦することも難しくなるかもしれないので、思い切って一から設計したロボットを作ってみようと思いました。
歯車機構について知識を深めたい
歯車って男心をくすぐりますよね。
機械には必要不可欠な歯車。昔から歯車が動くのを見るのは好きでした。
しかし、自分は電電に進んだ人間なので、学業では触れる機会がありませんでした。
ものづくり系のブログを運営しているので、日々情報取集しています。
その中で、やはり電子工作+3Dプリンターは無限の可能性を秘めていると感じます。
世の中の製品はたいていこの二つで作れてしまいます。
そんなこんなで、歯車機構を学ぶことで、工作の幅を広げたいという思いも今回挑戦する理由の一つです。
単純に面白そうだから
はい、これが一番大きな理由です。
作りたいものに理由なんていりません。
面白そうだから作る。これに尽きます。
ロボットアームを作ることで、将来的に発展形で作りたいものもありますが、それはまた後ほど。
ロボットアーム作成計画
ロボットアームの自由度について
ロボットアームを作る上で、自由度を考える必要があります。
自由度は一番簡単に説明すると、ロボットの関節の数の事です。
関節は多ければ多いほど複雑な動きが出来ます。
関節が一個しかなければ振り子のような単純な動きしかできませんが、関節が多いとタコのような複雑で滑らかな動きが出来ます。
つまり、自由度は多ければ多いほど良いのですが、この世界は3次元空間で出来ているので(人間が認識している範囲では)、多すぎても不必要かつコストがかかってしまいます。
一般的に産業用ロボットは6自由度のロボットアームです。
自由度が6個あれば、3次元空間で任意の場所や角度を自由自在に動かすことができます。
(加速度センサーも6軸です。)
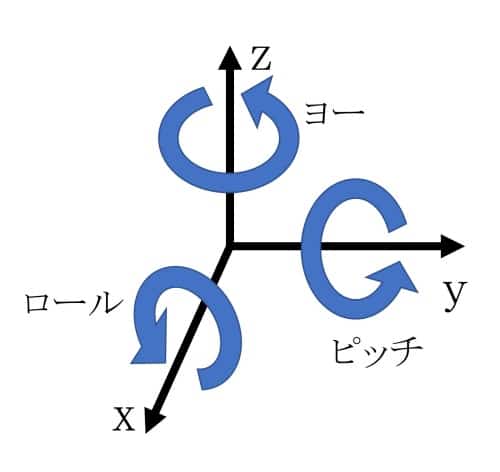
空間的な移動はX・Y・Z軸、回転はロール・ピッチ・ヨーの計6つの軸で表現できます。
私は今回、3軸のロボットアームを製作しようと考えています。
3次元空間の移動が自由自在なロボットアームです。
ハンドの回転はできませんが、軸を増やしすぎても難易度が高いので3軸に挑戦してみようと思います。
ロボットハンドの形状について



ロボットハンド(グリッパ)には様々な形状があります。
左から、爪が二つ、三つ、人間の手の形をしたハンドとなっており、順に複雑な構造になっています。
今回は、一番左の形状で製作します。
一番左の形状がホビー向けのグリッパによく使われるもので、私も以前使用したことがあります。
このグリッパは、サーボモータが一個あれば開閉が可能な単純な構造をしていて、形状的にもCADで製作しやすいので、こちらの形状で作りたいと思っています。