

こんにちは! けい(Twitter)です。
今回は、ロボットハンドを3Dプリンターで作ってみたので、その過程をまとめていきます。
この記事は「3Dプリンターで作るロボットアーム」シリーズの2つ目の記事です。
以前の記事を読んでいない方はぜひこちらのリンクから覗いてみてください。
目次
ロボットハンドの形状について
ロボットハンド(グリッパ)には、様々な形状があります。



二本爪でものを掴む形状のグリッパ、三本爪のグリッパ、はたまた人間の手の形をしたグリッパなど。
ここに載せた3例の他にも、沢山の種類の形状のグリッパがあります。
その中でも、今回製作するのは二本爪のグリッパです。
二本爪を選んだ理由としては以下の2点です。
1. 3Dプリンターで製作するのが容易な形状であること
2. ものが動く学問「機構学」への理解
要するに「3Dプリンター初心者でも作れそうな簡単な形状のロボットハンドを作ろう」という単純な理由です。
使用する機構学について
ロボットハンドを設計するにあたって、2つの機構学を使用します。
- リンク機構(平衡リンク)
- 歯車機構(平滑歯車)
リンク機構
リンク機構はリンクとジョイントからなる機構で、回転運動を往復運動に変えたり、その逆もできます。
リンク機構にも様々な種類がありますが、今回は平行リンクを使用します。
平行リンクは、その名の通り平行の関係を保ったままリンクが動作する機構です。
動作する様子を動画にまとめてみました。
緑色と赤色のリンクがありますが、それぞれで平行の関係が保たれていることが確認できます。
ジョイント部が回転すると、それに対応して4本のリンクが動作しますが、四角形の対辺のリンクが常に平行になることが特徴です。
この動作を利用して、グリッパのハンド部が常に平行になるように設計することが出来ます。
歯車機構
歯車は機械動作の基本で、動力を離れた場所に伝えたり、回転数を変換したりする役割を持ちます。
上の動画で、3つの歯車が連結しています。
左の歯車の回転が真ん中へ、そして右の歯車へと動力が伝達していることが分かります。
歯車の歯数に注目すると、左から48・24・48となっています。
つまり、左の歯車が一回転すると真ん中は半回転し、右は一回転します。
この関係を「速度伝達比」といい、歯数の比で表されます。
左から真ん中への速度伝達比は、24/48 = 0.5 となり、
真ん中から右側への速度伝達比は、 48/24 = 2 となります。
つまり、0.5×2 = 1 となり、最終部の右側の歯車は、初めの歯車と同じ速度で回ることになります。
3DCADでの設計
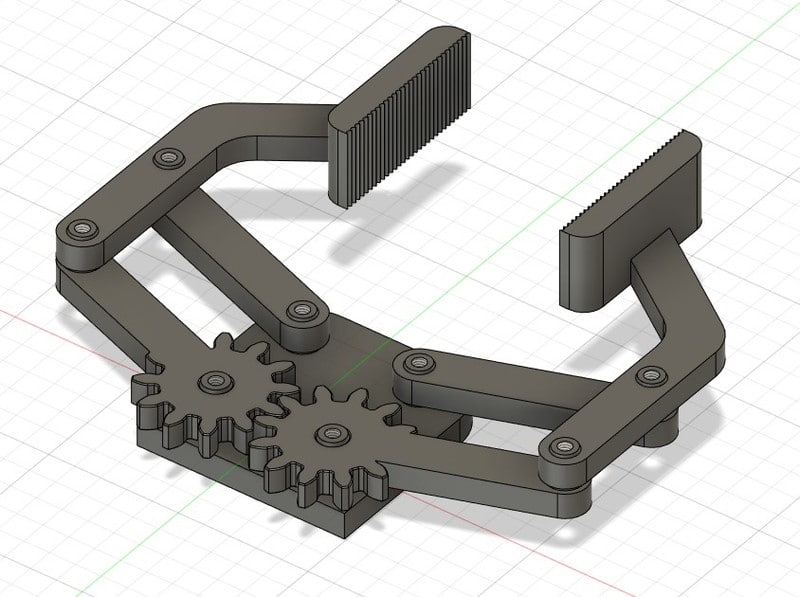
完成図
Fusion360を用いて、ロボットハンドを設計しました。
工夫した点
工夫した点としては以下の4点です。
平行リンク機構に基づいたロボットハンド
平行リンク機構については先ほど説明した通り、リンクが平行を保ったまま動作する機構です。
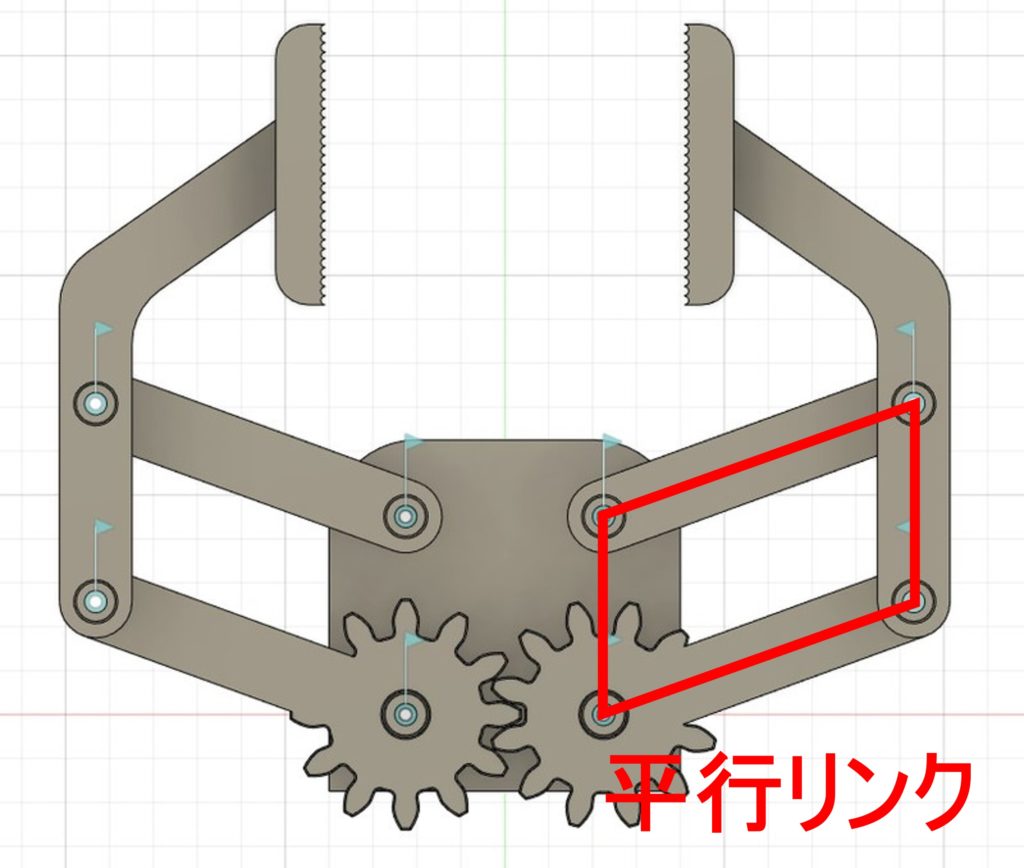
平行リンクになっているため、ハンドが開閉しても先端部も常に平行を保ったままでものを掴むことが可能になります。
関節部の接触する面積を減らす
ハンドが開閉する際に、どうしてもパーツ同士の間に「摩擦」が生じてしまいます。
大きな摩擦がかかると、動かすのに大きなトルクが必要で、スムーズさも阻害されます。
それを減らすためには、関節部の接触する面積を減らすことが効果的です。
断面解析で見てみると、
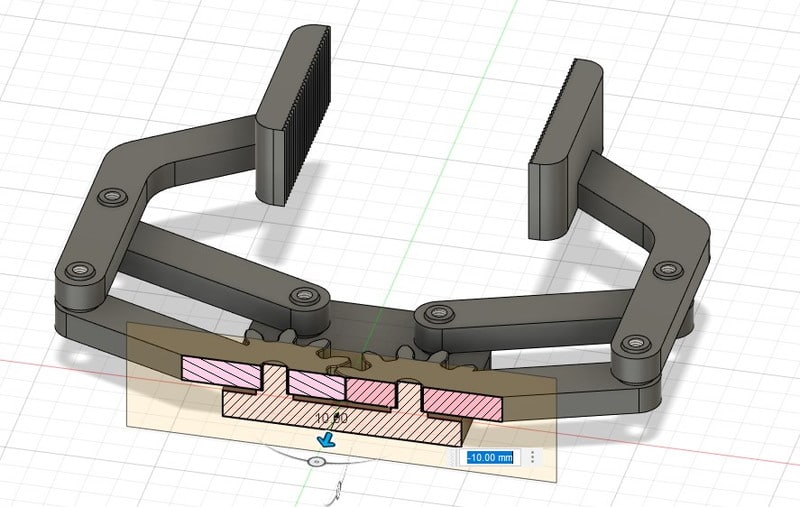

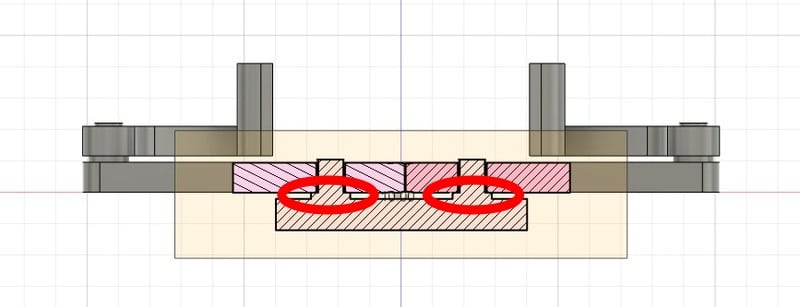
図の赤枠の部分が面積を減らすために工夫した点です。
このように、1mm程度の出っ張りをつけることで、パーツ同士が触れ合う面積が劇的に減っていることが分かります。
これにより、小さいトルクでハンドがスムーズに開閉できるようになります。
「遊び」を減らす
3Dプリンターで出力する際に、どうしても避けては通れないことが「遊び」です。
「遊び」は機械部品を組み立てるときのパーツ同士の余裕のことで、3Dプリンターの機種でも設けるべき遊びが変わってきます。
「遊び」の特性として、組み立てるパーツが増えるほど設けるべき「遊び」が大きくなります。
また、「遊び」が大きくなると組み立ては簡単になりますが、部品同士のがたつきが大きくなってしまいます。
そのため、「遊び」を減らすことでがたつきが小さいロボットを作ることが出来ます。
以前購入した、がたつきの大きいロボットアームがあります。

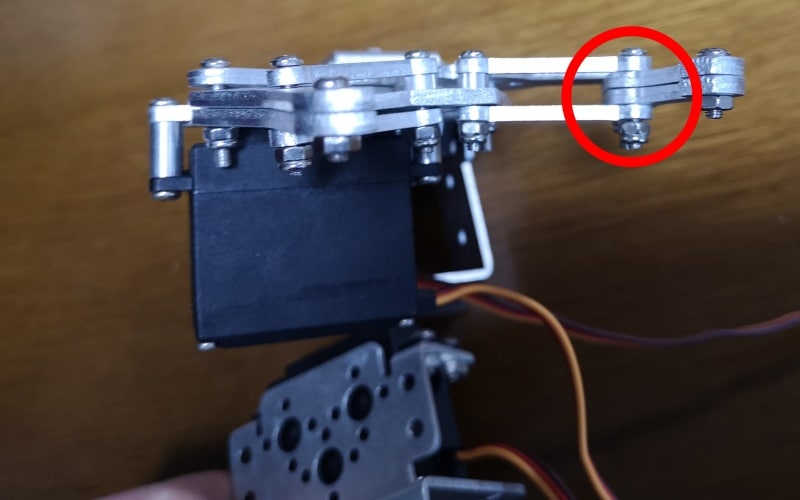
このロボットアームの赤丸の部分に注目すると、爪を両側から挟み込む形になっていました。
このためか、がたつきの大きいロボットアームでした。
そこで今回は、挟み込む形ではなく、よりパーツ数が少なくなるように設計しました。
ねじによる固定(ナットを使用しない)
先ほど紹介した以前購入したロボットアームを含め、ほとんどのロボットアームにはナットが使用されています。
ナットを使用すると、両側から締め付けることができるので、一見良さそうです。
しかし、実際はナットで関節部を固定すると2つの弊害が生じます。
そこで、接合部をねじだけ(ナットは使用しない)で締めることでこれらの問題を解決しました。
具体的には、ねじ頭が広いねじでリンク同士を固定します。
これにより、リンクの接合部にねじの締め付けによる圧力が加わらず、アームが開閉してもねじが緩むことはありません。

また、ねじを通すことで接合部の強度も十分に確保することができます。
この強度に関しては、きたになおき(@nkitani)さんが検証してくれていました。
3Dプリンターで実際にロボットハンドを作ってみた
3Dプリンター(Adventure 3)で実際に出力して動かしてみました。
スムーズに動いていることが確認できます。ハンドの先端も平行に保たれています。
このハンドを作るまでに5つくらいの試作品を作りましたが、最終的に摩擦とがたつきが小さいものを作ることが出来ました。
次回は、今回設計したロボットハンドを改良して、サーボモータで動かせるようにします。









両側から締め付けることで、摩擦が大きくなりスムーズな開閉が阻害されてしまいます。
また、アームの開閉とともにナットがどんどん緩んでしまい、定期的にねじを締め直す必要が生じます。