

目次
必要なもの
パーツ
| 部品名 | 用途 |
| Raspberry Pi 3 model B+ https://amzn.to/2JP3w1l | サーボモータの制御 |
| MCP3008 https://amzn.to/30093Ie | アナログ入力 |
| 可変抵抗 ✖ 3 https://amzn.to/30ehjAw | サーボモータのコントローラ |
| ロボットアーム https://amzn.to/30flZ9r | 三軸のトルクの大きいものを選ぶ |
※ロボットアームですが、AliExpressというサイトから買ったほうがお得なので、ぜひ興味のある方はそちらを検討されるのがよいかも知れません。しかし、中国から発送されるので、到着までに1週間以上かかります。
金額
ラズパイをお持ちの方なら部品だけで5千円を切るので、自分で3Dプリンタを買ってロボットアームを作るよりも、購入したほうが金額としては安く作れると思います。
組み立て
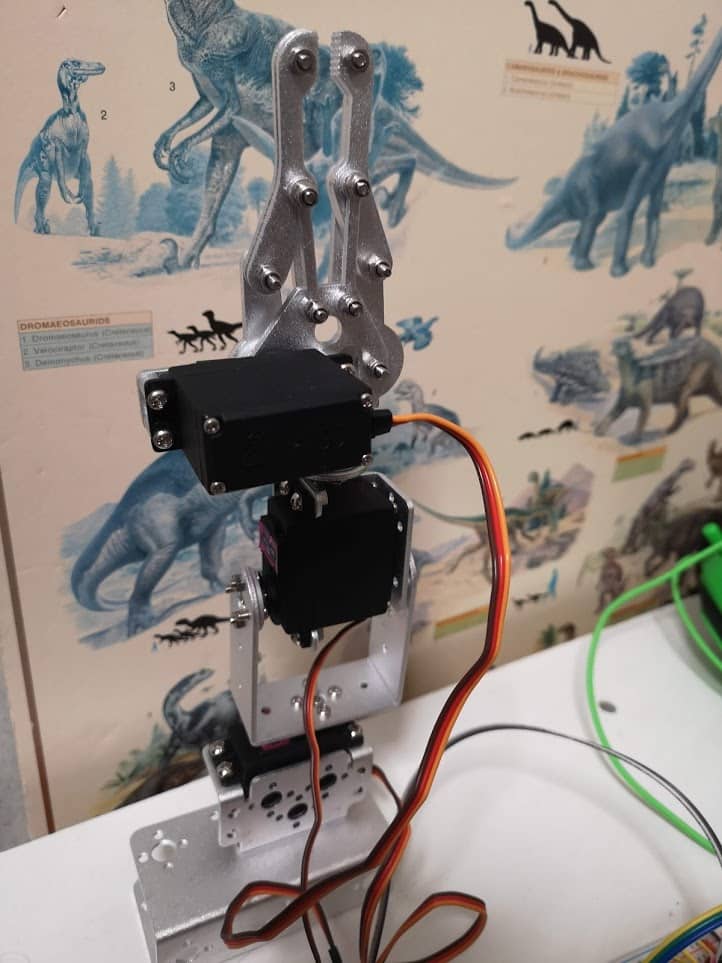
ロボットアーム
ロボットアームは未完成の状態で送られてきます。

- サーボモータ ✖ 3
- ロボットアームの骨格
- ねじ類
サーボモータ( mg996r )
仕様
トルク 9.4 kgf·cm (4.8 V ), 11 kgf·cm (6 V)
動作電圧 4.8 ~ 7.2 V
動作電流 500 ~ 900 mA (6Vの時)
過負荷電流 2.5A (6V)
PWM信号:周期 50ms
デューティー比 2 ~ 12 %
角度 0 ~ 180 °
データシート より引用

電源が5V以上で、電流がラズパイの許容電流を超えるので、外部電源として単三電池 ✖ 4 で 6 V の電源に接続しました。
ロボットアームの外観
回路
可変抵抗のつまみを回すことによって制御することを目指すので、可変抵抗の真ん中のピンをA/DコンバータであるMCP3008のチャンネルに入力している。

ソースコード
PWMはソフトウェアPWMを利用した。物を挟むことのできる先端のサーボモータだけは他と違い 0 ~ 180 ° まで回すことができないので、丁度よいデューティー比を自分で測定した。
| デューティー比 | |
| アームが開いているとき | 7.8% |
| アームが閉じているとき | 12% |
import RPi.GPIO as GPIO
from gpiozero import MCP3008
import sys
import time
import numpy as np
Vref = 3.33
# MCP3008から入力値を読み取る関数
def analog_read(channel):
pot = MCP3008(channel)
volt = pot.value * Vref
return volt
# 0~3.3Vの値をデューティー比の 2~12%に変換する関数
def mortor_signal(volt):
sig = []
#head mortor
sig.append ( round( ((7.8 - 12.0) / 3.3 ) * volt[0] + 12.0, 1) )
#middle mortor
sig.append ( round( ((2.0 - 12.0) / 3.3 ) * volt[1] + 12.0, 1) )
#botom mortor
sig.append ( round( ((2.0 - 12.0) / 3.3 ) * volt[2] + 12.0, 1) )
return sig # 2 ~ 12 %
#startup
GPIO.setmode(GPIO.BCM)
GPIO.setup(2, GPIO.OUT)
GPIO.setup(3, GPIO.OUT)
GPIO.setup(4, GPIO.OUT)
servo1 = GPIO.PWM(2, 50)
servo2 = GPIO.PWM(3, 50)
servo3 = GPIO.PWM(4, 50)
servo1.start(0)
servo2.start(0)
servo3.start(0)
#一つ前の信号を格納
old_sig = [0, 0, 0]
if __name__== "__main__":
try:
while True:
three_volt = []
duty_sig = []
filtered_duty_sig = []
for i in range(3):
volt = analog_read(i+1)
three_volt.append(volt)
time.sleep(0.01)
print(three_volt)
duty_sig = mortor_signal(three_volt)
print(duty_sig)
if duty_sig[0] != old_sig[0]:
servo1.ChangeDutyCycle(duty_sig[0])
if duty_sig[1] != old_sig[1]:
servo2.ChangeDutyCycle(duty_sig[1])
if duty_sig[2] != old_sig[2]:
servo3.ChangeDutyCycle(duty_sig[2])
old_sig = duty_sig.copy()
time.sleep(0.1)
except KeyboardInterrupt:
servo.stop()
GPIO.cleanup()
sys.exit(0)
完成品
完成品はYoutubeで公開しています。
※2020/3/6 追記
ロボットアーム企画第二弾が完成しました!!
今度は,AI画像認識で制御しました.一段とグレードアップしたので,ぜひ見て下さい!




コメントを残す