こんにちは! けい(Twitter)です.
今回は,ラズパイで超音波センサーを使って,距離を測る方法についてまとめていきたいと思います.また,フィルターを使って,安定したデータの取得の方法についてもまとめていきます.
目次
必要なもの
ラズパイ本体

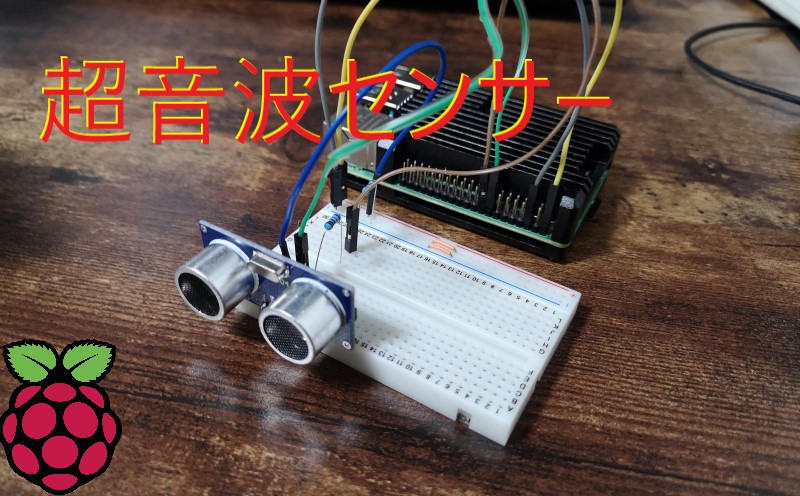
超音波センサー
超音波センサーは距離センサーの中でも安いのが特徴です.
1個当たり200円程度で入手できます.
回路図
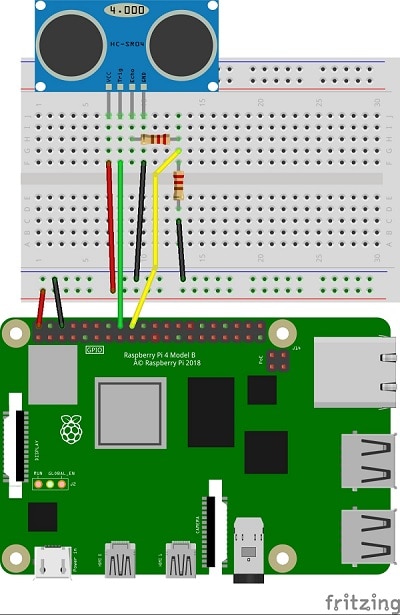
抵抗値は上が1kΩ,下が2kΩ
| ラズパイのピン | センサーのピン |
|---|---|
| 5V | VCC |
| GPIO23 | Trig |
| *GPIO24 | Echo |
| GND | GND |
*ラズベリーパイと超音波センサーをつなげるにあたって,超音波センサーが5V駆動なので,ラズパイの電圧である3.3Vにレベルシフトする必要があります.
5Vの電圧をラズパイに入力してしまうと,壊れる可能性があるので推奨されません.
なので,抵抗を用いて5Vを分圧することで,3.3Vになるように調整します.
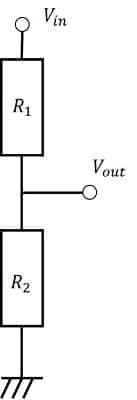
オームの法則より,分圧回路の方程式は次の式で表されます.
$$V_{out} = \frac{R_2}{R_1 + R_2}V_{in}$$
ここで分かっている変数は,$$V_{in}=5 , V_{out}=3.3$$
なので,式を変形すると
$$\frac{3.3}{5} = \frac{R_2}{R_1 + R_2}$$
$$\frac{2}{3} = \frac{R_2}{R_1 + R_2}$$
つまり,R2:(R1+R2) = 2:3になればいいので,R1:R2=1:2とすると,上手くいきます.
よって,R2がR1の2倍になるようにすればいいということが分かりました.
また,実際に抵抗値を決めるときに低すぎると,ラズパイから大電流が抵抗に流れてしまい,危ないので抵抗は高めに設定し,R1=1kΩとします.
従って,今回用いる抵抗は1kΩと2kΩのものになります.
プログラム
では,実際に超音波センサーを動作させ,距離を測定した後,画面に結果を出力するプログラムを動かしてみましょう.
import pigpio
import time
#set GPIO Pins
TRIG = 23
ECHO = 24
pi = pigpio.pi()
#set GPIO direction (IN / OUT)
pi.set_mode(TRIG, pigpio.OUTPUT)
pi.set_mode(ECHO, pigpio.INPUT)
def distance():
# set Trigger to HIGH
pi.write(TRIG, 1)
# set Trigger after 0.01ms to LOW
time.sleep(0.00001)
pi.write(TRIG, 0)
StartTime = time.time()
StopTime = time.time()
# save StartTime
while pi.read(ECHO) == 0:
StartTime = time.time()
# save time of arrival
while pi.read(ECHO) == 1:
StopTime = time.time()
# time difference between start and arrival
TimeElapsed = StopTime - StartTime
# sonic speed (34300 cm/s)
distance = (TimeElapsed * 34300) / 2
return distance
if __name__ == '__main__':
try:
while True:
dist = distance()
print ("Measured Distance = %.1f cm" % dist)
time.sleep(0.2)
except KeyboardInterrupt:
print("Measurement stopped by User")
pi.stop()実行方法
pigpioライブラリを用いているので,上のプログラムを実行する前に,ターミナルで以下のコマンドを入力します.
$ sudo pigpiod上のpythonプログラムを「ultrasonic_pigpio.py」というファイル名で保存したら,以下のコマンドで実行することができます.もちろんThonnyなどのPythonエディタでも実行できます.
$ python3 ultrasonic_pigpio.pyプログラム解説
TRIGとECHOが超音波センサーのピンと対応しています.
トリガーピンを10μ秒の間Highにして,物体に当たって超音波が返ってきたものをエコーピンでキャッチします.
センサー自体で計測できるのは時間だけです.なので,距離を出すためには音速を乗算する必要があります.(距離 = 速さ × 時間)
最後に,往復分の時間を測定しているので2で割ると実際の距離を計算できます.
測定精度が悪い?
上のプログラムを実行すると分かると思いますが,同じ距離を測定しているのに結果がバラバラだったりします.
画像
平気で3cm前後のばらつきが生じています.
そこで,測定精度を改善するためにフィルターを用意してみたいと思います.
フィルターといっても簡単なもので中央値フィルターというものです.こちらのフィルターはよく画像処理の分野で使われているそうですが,センサーの値にも適応させてみたいと思います.
プログラム(フィルター利用ver)
中央値フィルターの概要
今回は1次元の中央値フィルターを用います.
下の画像のように10個の数字を入れる箱を用意します.
センサーの値は順にロケットえんぴつのように,10個の箱に入っていき,古いデータからはじきだされていきます.
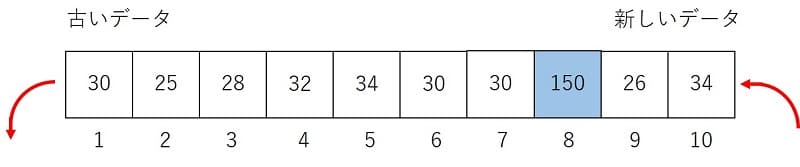
30cmの距離を測定したいときの10回分の取得したデータが上の画像のような場合,結構なブレ幅であることが分かります.
また,青色で示した部分が外れ値となっていて,このまま結果として出力すると誤った結果となってしまいます.
しかし,中央値フィルターを用いれば,10個のデータの中央値を1つ結果としてはきだすので,外れ値が結果として出力されません.
上の10個のデータを大きい順から並べると,(25,26,28,30,30,30,32,34,34,150)となっていて,中央値は30となります.
プログラム
import pigpio
import time
import collections
import numpy
TRIG = 23
ECHO = 24
pi = pigpio.pi()
#set GPIO direction (IN / OUT)
pi.set_mode(TRIG, pigpio.OUTPUT)
pi.set_mode(ECHO, pigpio.INPUT)
# 中央値フィルター用の箱10個
history = collections.deque(maxlen=10)
def distance():
# set Trigger to HIGH
pi.write(TRIG, 1)
# set Trigger after 0.01ms to LOW
time.sleep(0.00001)
pi.write(TRIG, 0)
StartTime = time.time()
StopTime = time.time()
# save StartTime
while pi.read(ECHO) == 0:
StartTime = time.time()
# save time of arrival
while pi.read(ECHO) == 1:
StopTime = time.time()
# time difference between start and arrival
TimeElapsed = StopTime - StartTime
# sonic speed (34300 cm/s)
distance = (TimeElapsed * 34300) / 2
return distance
def distance_filtered():
history.append(distance())
return numpy.median(history)
if __name__ == '__main__':
try:
while True:
dist = distance_filtered()
print ("Measured Distance = %.1f cm" % dist)
time.sleep(0.2)
# Reset by pressing CTRL + C
except KeyboardInterrupt:
print("Measurement stopped by User")
pi.stop()プログラム解説
1個目のプログラムから変更した点はハイライトしている部分です.
まず,16行目に中央値フィルターのための10個の箱を用意します.
この際リストで作るのではなく,collectionsのdequeを使うことで,ロケットえんぴつ型のリストができます.
44行目にdistance_filtered()という関数を作りました.
numpyのmedian関数を用いることで中央値を求めます.
まとめ
今回は,ラズパイで超音波センサーを使って,距離を測定し,測定精度を上げるために中央値フィルターを用いたプログラムをまとめました.
距離を測定するセンサーの中では超音波センサーが安価で手に入るので,ぜひ使ってみてください.
では!