こんにちは! けい(Twitter)です。
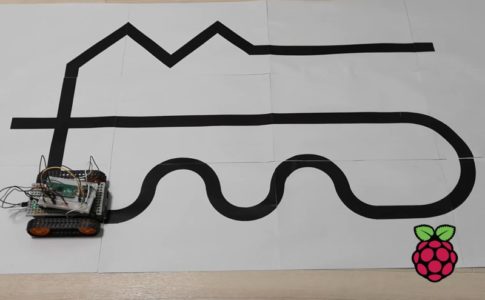
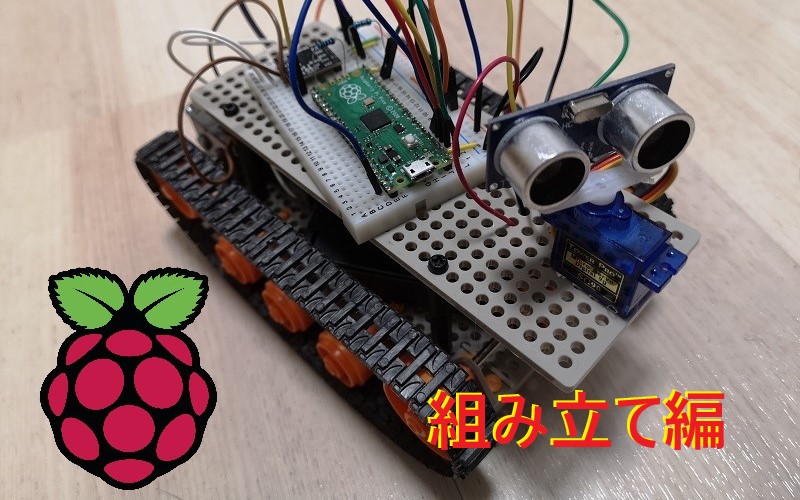
ラズピコ(Raspberry Pi Pico)で色々と電子工作を遊んできました。その集大成として自動運転ロボットカーを作りました。
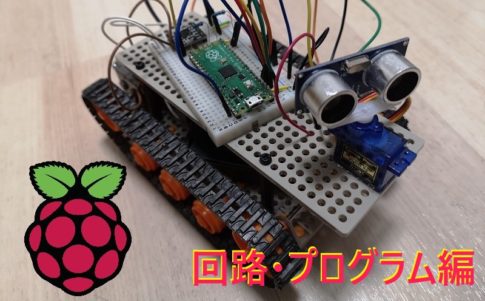
今回は組み立て編ということで、必要な材料や組み立て方をご紹介していきたいと思います。
目次
必要な物
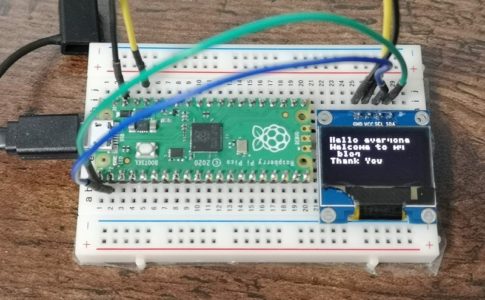
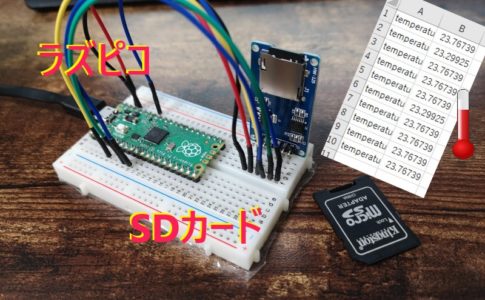
Raspberry Pi Pico
今回のロボットのメイン基板ラズピコ

モータードライバ
Raspberry Pi Picoに使うモータードライバとして、2つのDCモーターを制御できるモータードライバを使います。

モーター
タミヤのダブルギヤボックスを使います。このモーターはパワフルで、タミヤの製品との組み合わせが簡単なのでおすすめです。

ボディ
タミヤのユニバーサルプレートに、モーターやキャタピラを固定します。


電池(4.5V)
モーター駆動用とラズピコの電源として使用します。電池3本で4.5Vとします。

サーボモーター
超音波センサーを乗せて首振り機能を付けるのに使います。

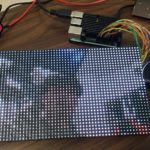
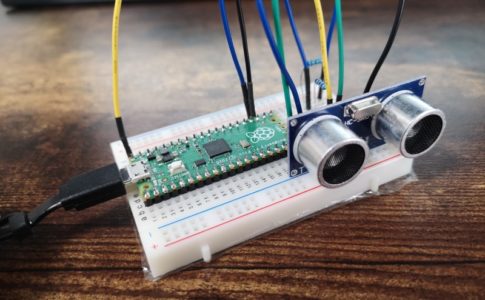
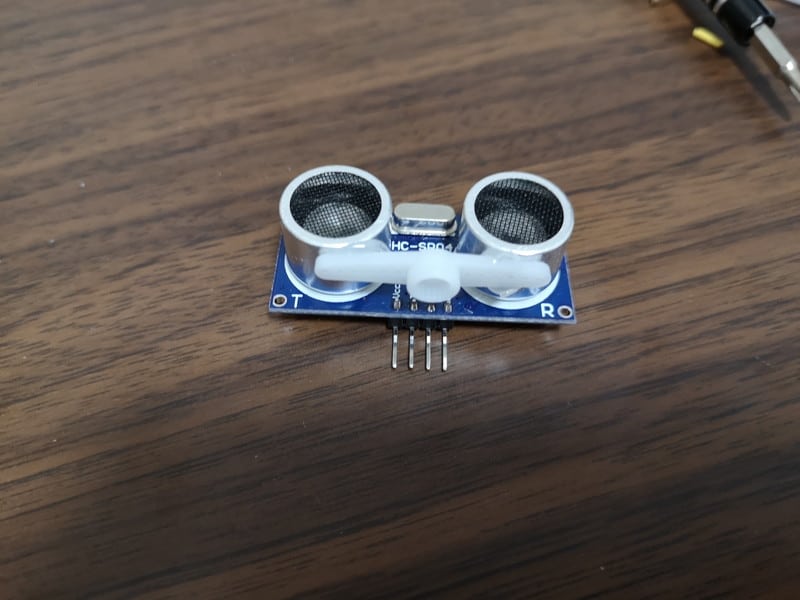
超音波センサー
自動運転の要となるセンサーです。
超音波センサーで距離を取得し、壁にぶつからないように走行することが可能となります。
あると便利な物
グルーガン
グルーガンがあると、サーボモーターとボディの固定などに便利です。
また、電子工作と親和性が高いので、持っておくと今後も便利なものです。

スペーサー
ユニバーサルプレートを二段にして、ロボットを二階建てにするために使います。
見た目を気にしないなら強引に二階建てにすることも可能ですが(参考)、スペーサーがあるとすっきりします。

その他
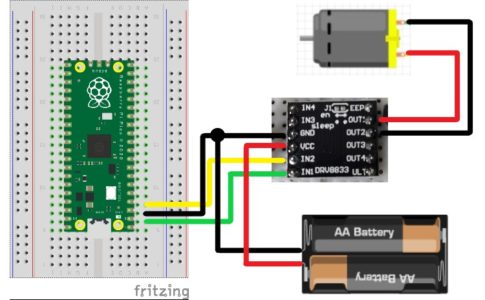
配線はブレッドボードとジャンパワイヤーで接続しました。
はんだ付けしたい方ははんだ付けをおすすめします。


ロボットの組み立て
タミヤの3点セットを順番に組み立てていきます。

ギヤボックスの組み立て
ダブルギヤボックスを組み立てることが一番時間がかかると思います。
意外と難しいので、説明書をしっかり読んでやってみて下さい。
私は沼って1時間以上かかりました(笑)
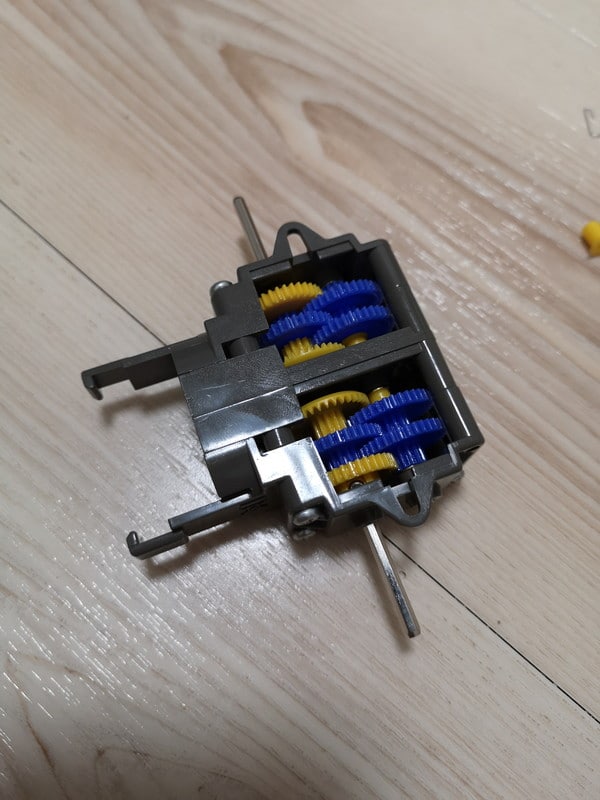

ダブルギヤボックスの説明書に複数のタイプを選択できるようになっています。
| タイプ | ギヤ比 | 回転トルク[gf・cm] | 回転数 [rpm] |
|---|---|---|---|
| A | 12.7:1 | 94 | 1039 |
| B | 38.2:1 | 278 | 345 |
| C | 114.7:1 | 809 | 115 |
| D | 344.2:1 | 2276 | 38 |
ロボットを動かすためにはトルクが必要なので、CかDタイプをおすすめします。私はスピードは求めていなかったため、Dタイプにしました。
あと、あまり回転数が高いと超音波センサーで距離を測定する前に壁に激突するので注意です。
ユニバーサルプレートにタイヤを固定
ユニバーサルプレートにタイヤを固定します。
後輪にモーターを付けるので、それ以外の前輪と真ん中の3つのタイヤを固定します。
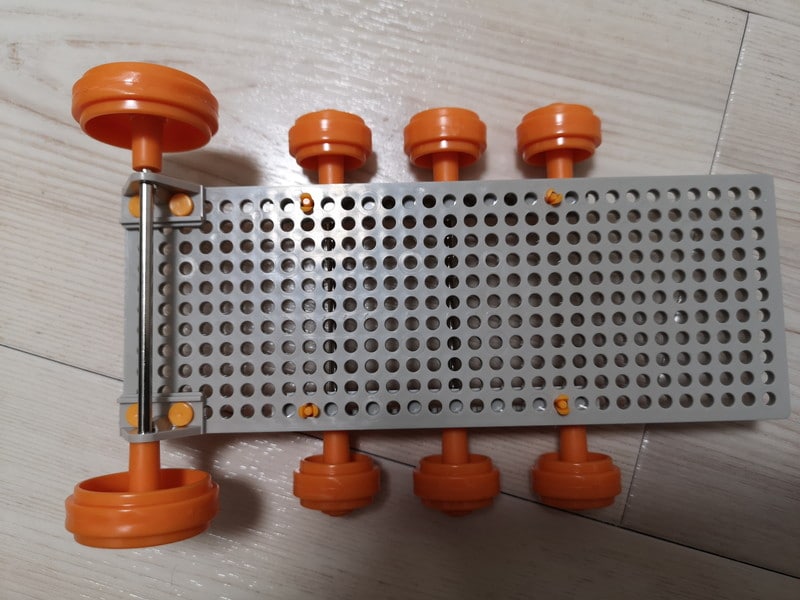

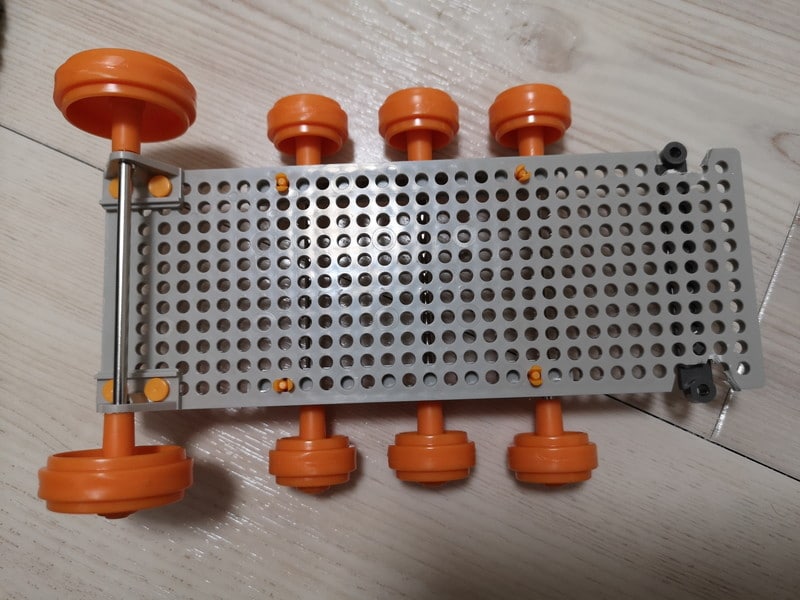
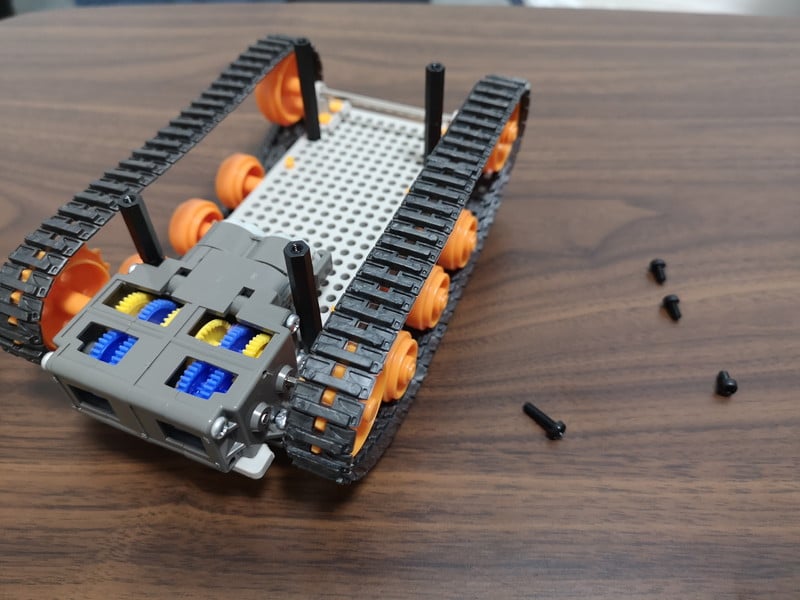
モーターを固定するためにユニバーサルプレートを画像のように一部くり抜きます。
ペンチでくり抜くことができます。
キャタピラ
続いて、キャタピラの作成です。



一番長いの1つ、真ん中の長さの2つ、一番短いの1つを組み合わせると丁度良い長さになります。
これを2本作ります。
ここまで出来たら、モーターを固定してキャタピラが装着できます。
ロボットの二段化
次に、ロボットを2階建てにするためにスペーサーを用意します。
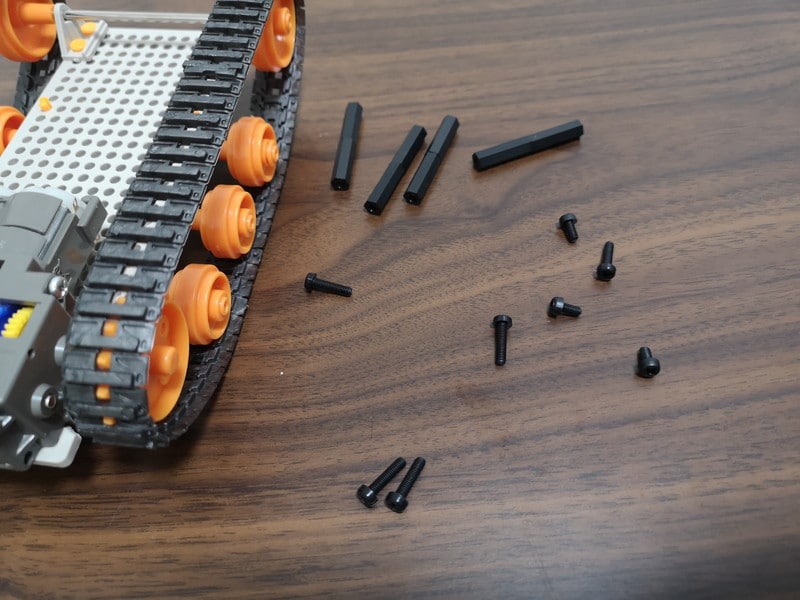
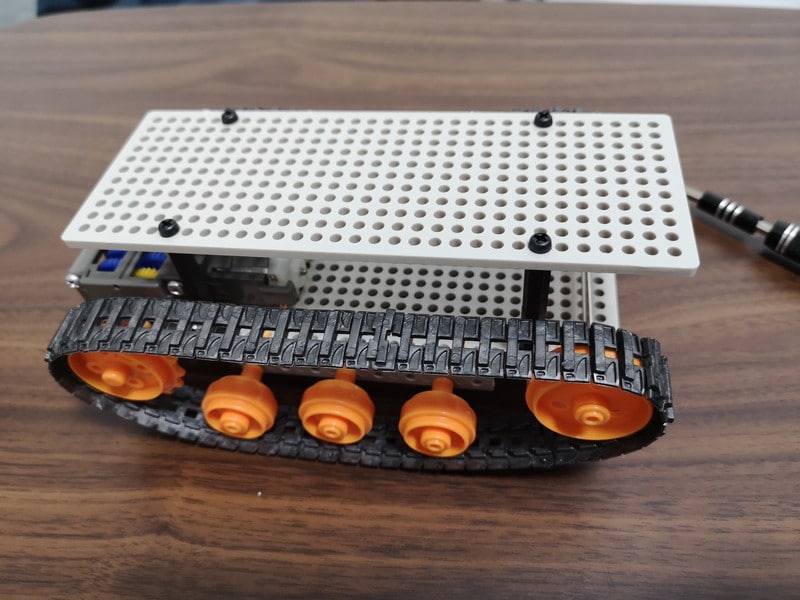
スペーサーは連結させることで丁度良い長さにすることができるので、自分が出したい高さにしてください。
これでロボットのボディの組み立ては完了しました。
超音波センサーとサーボモーターの固定
次に、超音波センサーとサーボモーターをグルーガンで固定します。
モーターが動いても配線が干渉しないようにします。


これで、ロボットの機械的な部分、組み立ては終了です。
次の回では配線とプログラムについて紹介したいと思います。