こんにちは! けい(Twitter)です。
普段は電子工作をやりながら、それをブログで情報発信を行っています。
そんな私が電子工作を始めて約2年ほど経過しました。
そこで、私が人生で初めての電子工作で作ったロボットカーを2年の時を経た今、ご紹介していきたいと思います。
目次
材料
Arduino mega
「Arduino Uno」だと「モータ・ドライバ」が全ての「gpioピン」を使ってしまうため、「Arduino Mega」を使用します。

モータードライバ
モータードライバを使うと簡単にプログラムを書けます。
ピンヘッダーをはんだ付けする必要があるので、そちらも持っていない方は用意してください。
モーター
タミヤのシリーズを買うと、プロモデルみたいにロボットを組み立てられるので、初心者におすすめです。

ボディ
タミヤのユニバーサルプレートに、モーターやキャタピラを固定します。

キャタピラがやっぱりかっこいい!

電池(3V)
モーター駆動用の電池です。モーターの定格が3Vなので、電池2つを使用します。

サーボモーター
超音波センサーを乗せて首振り機能を付けるのに使います。

超音波センサー
自動運転の要となるセンサーです。
障害物との距離を測定して、壁にぶつからないように走行することが可能となります。
モバイルバッテリー
Arduinoに電源を供給するためのモバイルバッテリーがあると、パソコンと線を繋がなくても良いので、よりロボット感がでます。
ほとんどのモバイルバッテリーが「Arduino」で動作します。モバイルバッテリーとArduinoをUSBで接続して、Arduinoに電力を供給します。
ロボットカーに乗るような小型のものがおすすめです。
あると便利なもの
グルーガンがあると、サーボモーターとボディの固定などに便利です。
また、電子工作と親和性が高いので、持っておくと今後も便利なものです。
100均でも売っていますが、使い心地が最悪なので1000円程度のものを買うことをお勧めします。
(作業効率が100倍になります。)

ロボットカーの組み立て
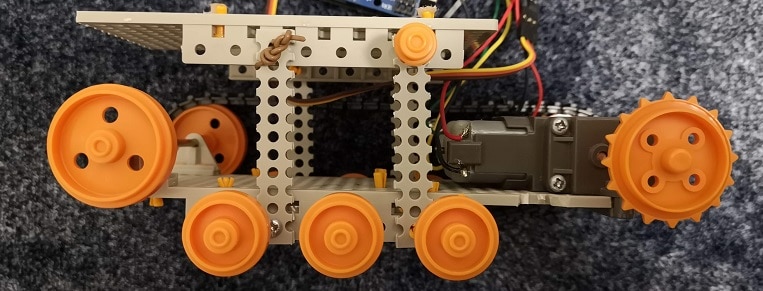
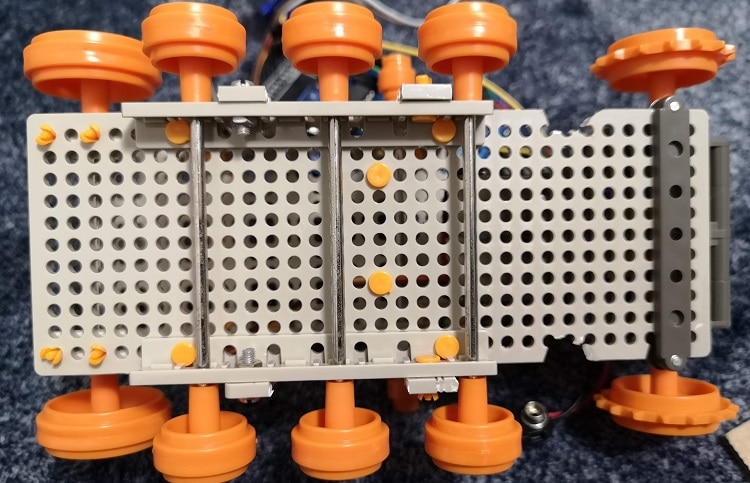
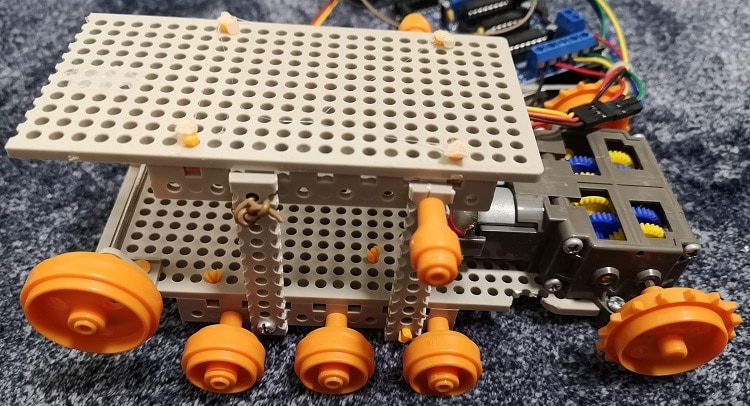
タミヤのダブルギヤモーター、ユニバーサルプレート、トラック&ホイールを組み合わせてロボットカーのボディを組み立てます。
説明書が入っているので、それを読みながらフィーリングで作れます。
下の写真はただの一例ですので、ご自由に作ってください。
配線
モータードライバの接続
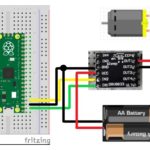
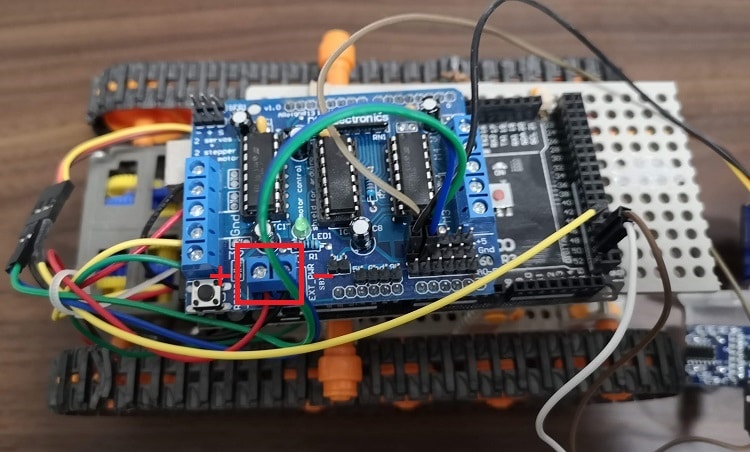
モータードライバの配線はこのようになっています。

この中で使うものは、「M1」「M2」「INPUT+」「INPUT-」です。
また、超音波センサーとサーボモーターの電源ピンをモータードライバからとりたいので、ピンヘッダーをはんだ付けしてください。
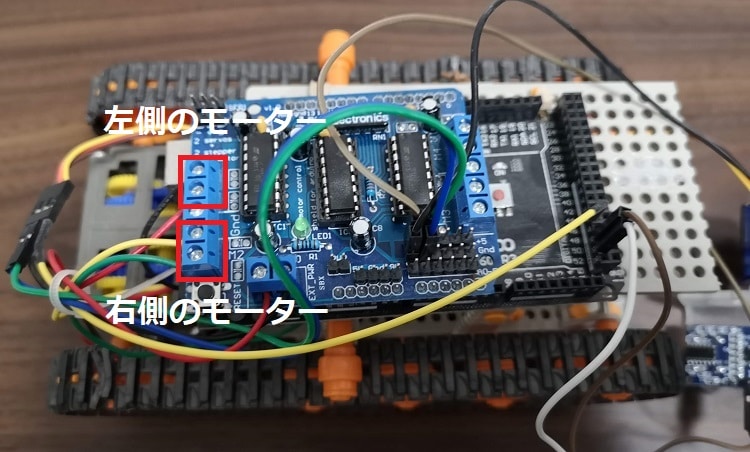
私の場合はM1に左側のモーター、M2に右側のモーターを接続しました。
また、INPUTはモーターの電源を接続します。つまり、電池ボックスのコネクタを接続します。
全体の配線

順に部分ごとに説明していきます。
モーターの接続部
電池ボックスの接続
電池ボックスの+(赤)と-(黒)のコネクタを接続します。
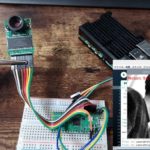
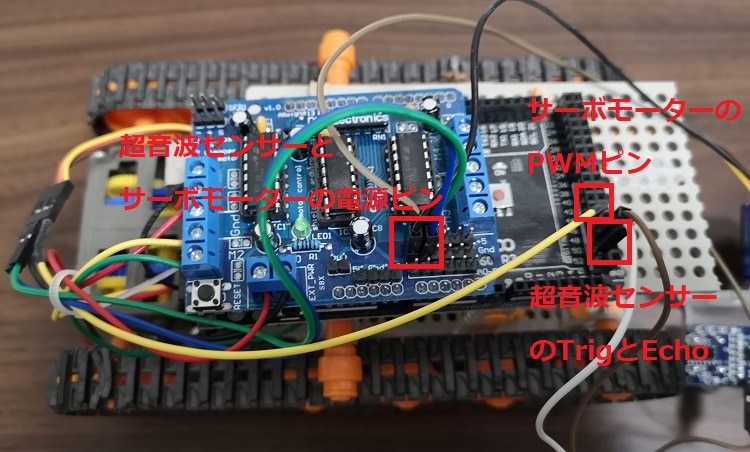
超音波センサーとサーボモーター
超音波センサーとサーボモーターのVCCとGNDをモータードライバ上の5VとGndに接続します。
また、超音波センサーのTrigピンをgpio52、Echoピンをgpio50、サーボモーターのPWMピンをgpio46に接続します。
以上で配線は終了です。
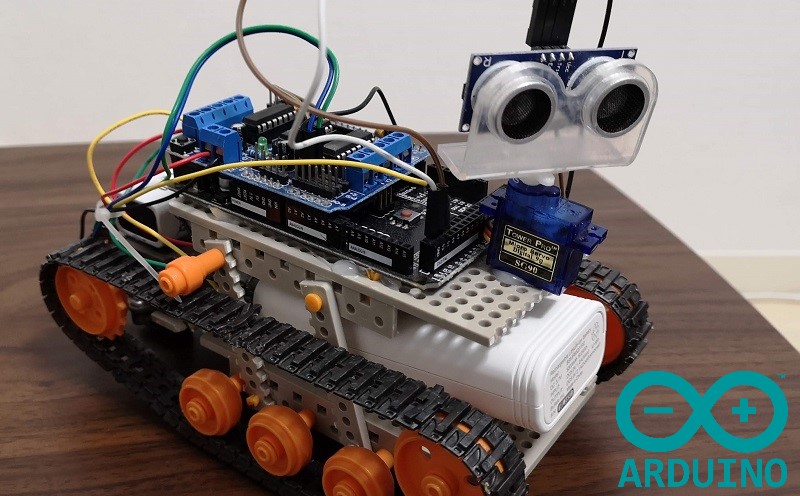
ロボットカーの完成系
「電池ボックス」「Arduino」「サーボモーター」をグルーガンで固定したら、ロボットカーの完成です。

モータードライバのライブラリのインストール
続いて、ソフト側の準備に移行します。
Arduinoを開いて、「スケッチ」→「ライブラリをインクルード」→「ライブラリを管理」をクリックします。
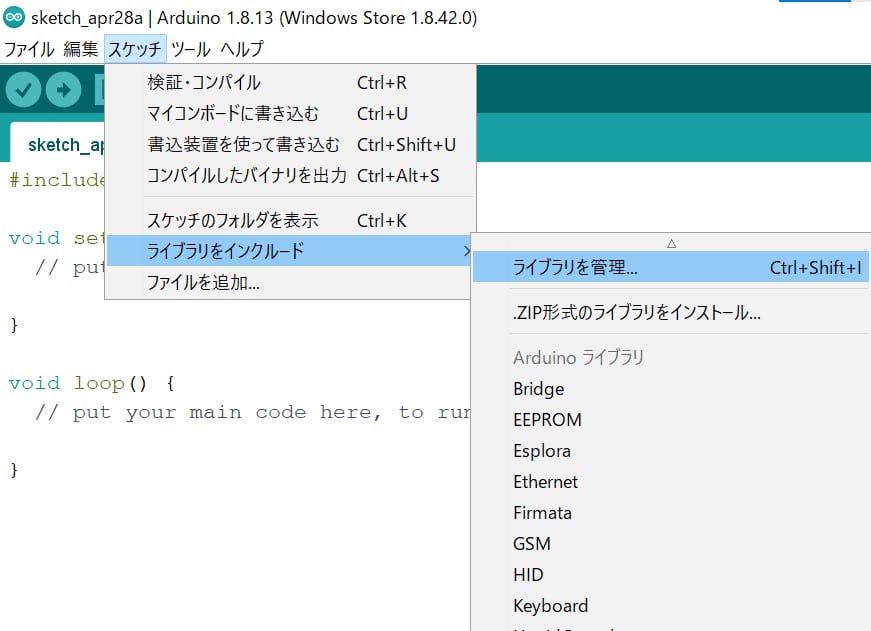
検索窓で「adafruit motor」と入力してEnterを押します。
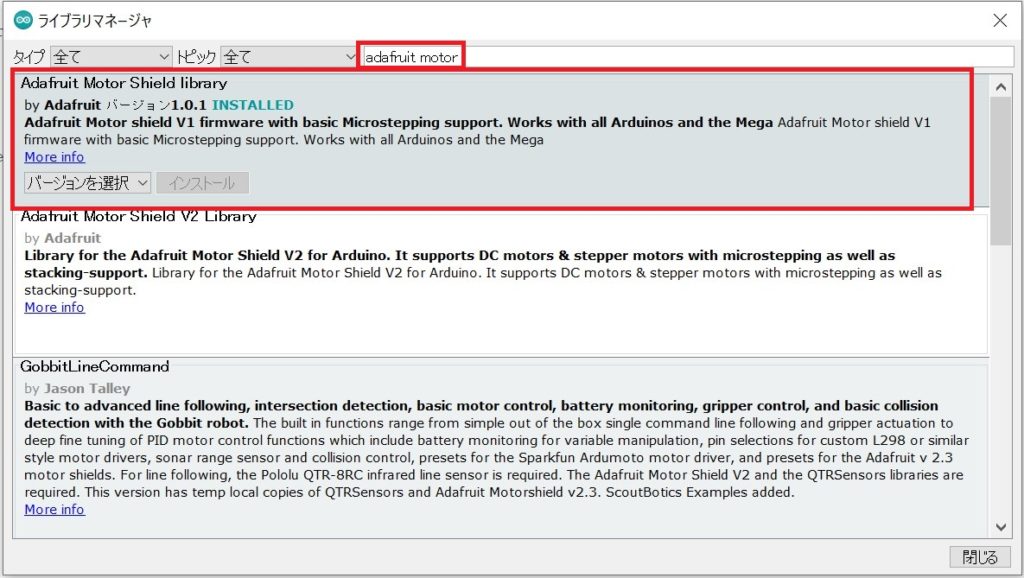
一番上に出てくるものをインストールしてください。
(上の画像ではすでにインストールした画面になってます)
プログラム
このプログラムで動きはしますが、電子工作のど初心者が書いたものなのできちゃないコードです。
あえて2年前の無修正コードを載せています。参考にはしないでください。
#include <Servo.h>
#include <AFMotor.h>
#define echoPin 50 // Echo Pin
#define trigPin 52 // Trigger Pin
#define servoPin 46 //servo Pin
#define point 30 //距離の基準
double Duration = 0; //受信した間隔
double Distance[9]; //距離 50°から130までの距離を10°ずつに9個の値を格納
Servo myservo;
AF_DCMotor motorleft(1);
AF_DCMotor motorright(2);
int pos[9]={50,60,70,80,90,100,110,120,130}; //サーボの角度 50°から130°までの9個値を格納
int i=0; //角度のカウント関数
int N=0; //90°の時の値
int R=0; //60°の時の値
int R1=0; //80°の時の値
int L=0; //120°の時の値
int L1=0; //100°の時の値
int q=0; //状態関数 q=0->静止 q=1->直進
void setup() {
Serial.begin( 9600 );
myservo.attach(servoPin);
motorleft.setSpeed(100);
motorleft.run(RELEASE);
motorright.setSpeed(100);
motorright.run(RELEASE);
pinMode( echoPin, INPUT );
pinMode( trigPin, OUTPUT );
}
void loop() {
for (i=0; i<=8; i++){ //カウンタ関数を進めて配列に格納
myservo.write(pos[i]); //サーボを回転
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite( trigPin, HIGH ); //超音波を出力
delayMicroseconds( 10 ); //
digitalWrite( trigPin, LOW );
Duration = pulseIn( echoPin, HIGH ); //センサからの入力
if (Duration > 0) {
Duration = Duration/2; //往復距離を半分にする
Distance[i] = Duration*340*100/1000000; // 音速を340m/sに設定
//評価する3つの値をそれぞれ格納
N=Distance[4];
R=Distance[1];
L=Distance[7];
R1=Distance[3];
L1=Distance[5];
Serial.print("angle:");
Serial.print(pos[i]);
Serial.print(" ");
Serial.print("Distance:");
Serial.print(Distance[i]);
Serial.println(" cm");
if(i==0) delay(300); //50°から130°までは距離があるため
else delay(50);
}
}
switch(q){
case 0 :
if(point<N&&point<R1&&point<L1){
motorleft.run(FORWARD);
motorright.run(FORWARD);
q=1; //状態
delay(500);
}
else if(N<point&&L>R){
q=2;
}
else if(N<point&&R>=L){
q=5;
}
else{
motorleft.run(BACKWARD);
motorright.run(BACKWARD);
delay(500);
motorleft.run(RELEASE);
motorright.run(RELEASE);
}
break;
case 1 :
if(point<N&&point<R1&&point<L1){
motorleft.run(FORWARD);
motorright.run(FORWARD);
delay(300);
}
else if(point>=N||point>=R1||point>=L1){
motorleft.run(RELEASE);
motorright.run(RELEASE);
q=0;
delay(500);
}
break;
case 2 : //左回転
motorright.run(FORWARD);
motorleft.run(BACKWARD);
delay(1000);
motorright.run(RELEASE);
motorleft.run(RELEASE);
q=0;
break;
case 5 : //右回転
motorleft.run(FORWARD);
motorright.run(BACKWARD);
delay(1000);
motorleft.run(RELEASE);
motorright.run(RELEASE);
q=0;
break;
default :
motorleft.run(BACKWARD);
motorright.run(BACKWARD);
delay(1000);
motorleft.run(RELEASE);
motorright.run(RELEASE);
q=0;
break;
}
}動画
2年前に動かした動画がyoutubeにアップしてありました。気になった方はぜひ見て下さい。
合わせて読みたい記事
Raspberry Pi Picoでも同様に、自動運転ロボットカーを作成しました。
今回の反省も踏まえて、よりグレードアップしたものを作ったのでぜひ見て行ってください。